IPS软件简介 工业路径解决方案(IPS)是弗劳恩霍夫-查尔姆斯中心(FCC)多年来与汽车行业密切合作开发的。它是一个 商业软件包,主要包括刚体路径规划器、机构路径规划器、点云工具、虚拟喷漆、虚拟涂胶、智能移动假人、 机器人优化和柔性结构等。
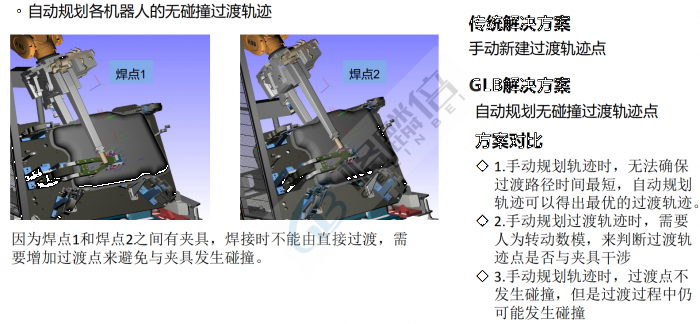
机器人焊接面临的问题A、手动规划机器人焊接过渡轨迹,无法自动规避碰撞,仿真调试工作量较大
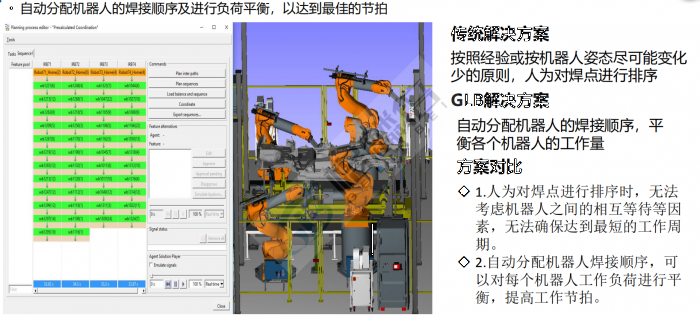
B、需要人为规划焊接顺序及分配每个机器人焊点数量,无法达到最佳的生产节拍
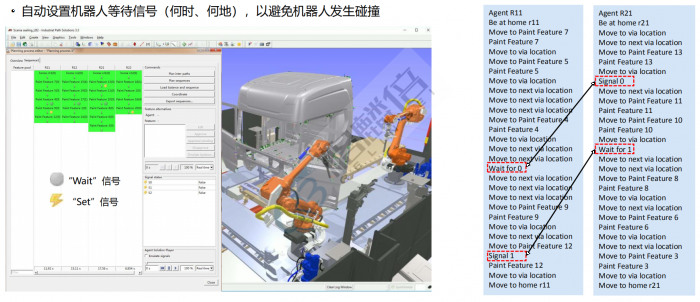
C、需要手动设置各机器人之间的等待信号,进行干涉区设置
D、设计阶段不能准确节拍评估 E、机器人故障时无替代的降级方案
解决方法
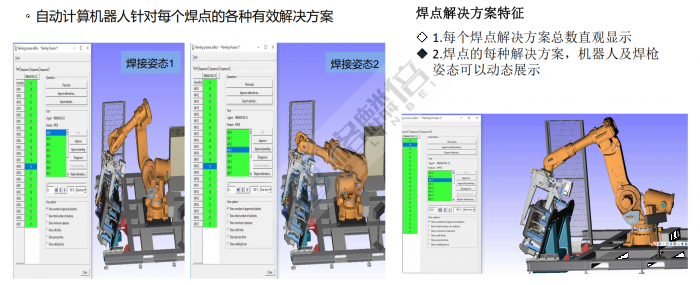
1、焊点解决方案
2、过渡轨迹规划
3、焊点分配及负荷平衡
4、信号设置
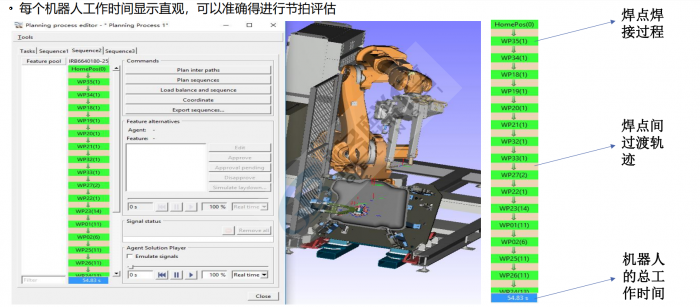
5、节拍评估
 仿真流程
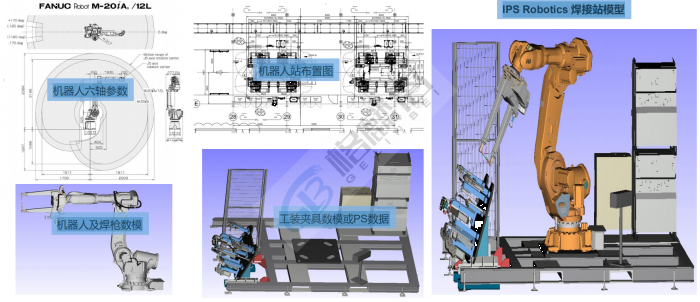
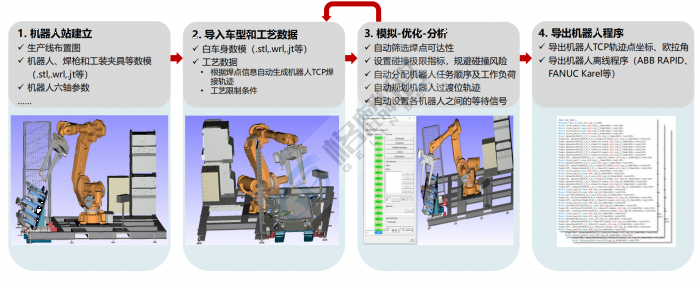
仿真流程焊接工作站模型建立
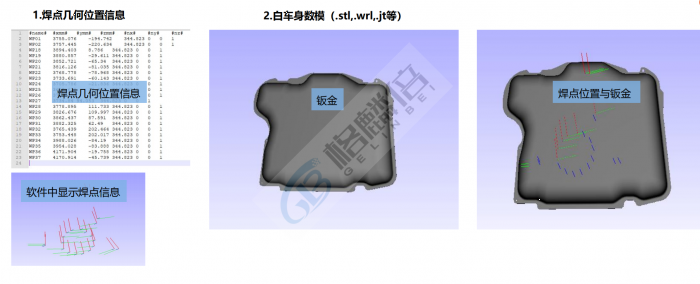
输入
模拟-优化-分析
输出

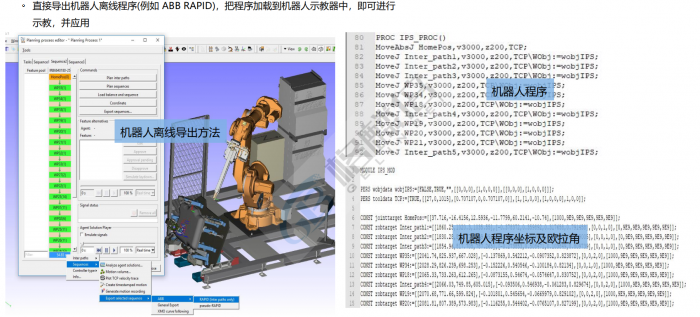
输出离线程序
IPS Robotics焊接仿真流程
案例演示---焊接仿真演示
IPS Robotics 是一款集优化机器人姿态,机器人任务顺序,多目标参数 优化为一体的机器人离线仿真优化软件。特点
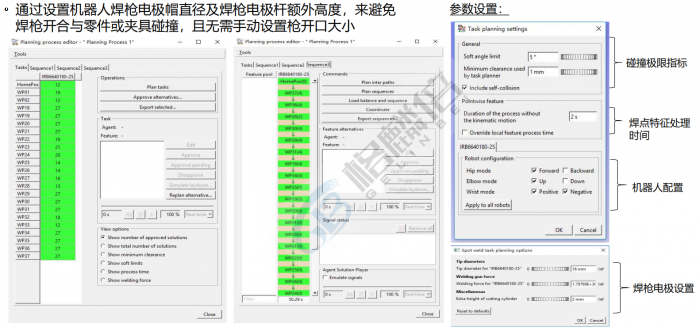
1、自动筛选焊点可达性2、设置碰撞极限指标,自动规避碰撞风险
3、自动分配机器人任务顺序及工作负荷4、自动规划机器人过渡位轨迹
5、自动设置各机器人之间的等待信号 作用通过使用IPS Robotics,用户可以降低离线编程难度,降低机器人工 作的等待时间,平衡各个机器人的负荷,极大提升生产节拍。
总结---IPS Robotics 焊接方案





